초보분들을 위한 콜렉티브 피치와 사이클릭 피치
2007년도에 G3를 하다가 기체 에디트에 보면 Cyclic pitch 라고 되어 있었는데 이 값을 변화시켜주면 헬기의 기동(에일러론 엘리베이터)이 잘되던 기억이 있었습니다. 그 때는 이게 왜 피치 인가 라고 생각했었지요.
피치 라고 하면 첨엔 당연히 상승 하강을 하기 위한 메인로터의 각도를 얘기하는거 아닌가 라고 했었죠.
하지만 이 피치에는 두가지가 있더라구요. 둘다 메인로터의 각도를 얘기하는것은 맞습니다만
작용하는 힘이 다 틀리답니다.
첫번째로 Collective Pitch 콜렉티브 피치입니다.
이것은 다들 아시는것 처럼 상승 하강에 관여하는 메인로터의 피치값을 의미합니다.
세팅 방법은 다들 아시다시피 피치 그래프는 0 25 50 75 100으로 직선으로 된 상태에서
조종기 스로틀 레버 중간에 두고 피치는 0도.. 최대 최하에서 보통 12도 -12도 로 설정합니다.
이 설정 방법에 대해서는 많은자료가 있으니 참고해보시구요.
오늘 얘기하고자 하는 중심은 바로 Cyclic Pitch 사이클릭 피치 입니다.
이것도 메인로터의 피치값을 측정하기는 합니다만 그 작용되는 힘이 다릅니다.
그전에 앞서 설명드린 헬기의 기동 원리에 대해 살펴볼까요.
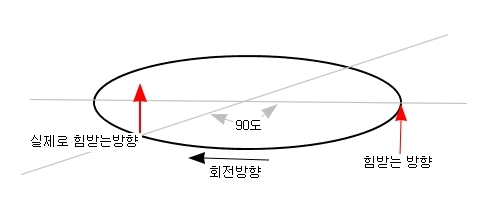
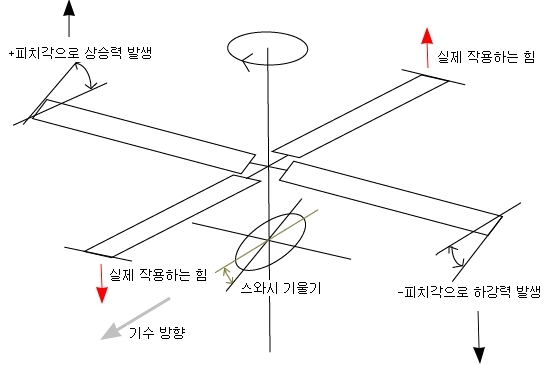
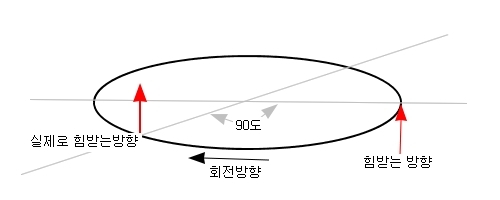
자이로스코픽 프리세션(Gyroscopic Precession)이란 원리에 의해 헬기가 기동한다고 알려드렸습니다.
위 처럼 자이로프리세션의 원리에 의해 메인로터의 피치값이 한바퀴 회전할 때마다 각 방향에서
계속 변화하게 되어 이 힘에 의해 헬기가 기동하게 되죠. 이 때 조종기 스틱에 따라 스와시가 기울게 되는데 이 경우
각 방향에서 생기게 되는 메인로터의 피치값을 사이클릭 피치 라고 합니다. ^^
이 사이클릭 피치를 재는 방법은 스로틀 레버 중간에 두고 엘리베이터든 에일러론이든 하나의 키를 끝까지 치고서
메인로터의 피치값이 생기는 방향에서 피치값을 측정합니다. 보통은 7도 정도가 나오게 되구요.
이 사이클릭 피치가 클 수록 위 그림의 힘이 커지므로 헬기의 기동은 좋아지게 됩니다. 쉽게 말해 잘 넘어가는거죠 ㅋㅋㅋㅋ...
하지만 이 사이클릭 피치를 크게 하기 위해서는 스와시 타각을 키워야 하는데요. 너무 키우다 보면 스와시 시스템의 한계에
다다르게 되어 부하를 받아서 회전수가 떨어지게 됩니다. 따라서 잘넘어가게 하려고 스와시 믹싱값을 크게 하면 오히려
RPM이 떨어져서 더 안넘어가는 경우도 생길 수 있지요. 자 아뭏든 이 사이클릭 피치라는게 어떤건지 대략 아셨는지
모르겠습니다. 위 원리에 의해 패들이 없더라도 헬기는 기동하게 되구요. 패들은 자세를 좀더 정확히 잡아주기 위한
기계적 자이로 장치라고 생각하시면 되겠습니다. 물론 4채널 헬기들은 메인로터의 각도가 변화하지 않으므로
패들에 의해 기동을 하게 되겠죠.. ^^ 그래서 굼뜬다는 느낌이 들지도.. ㅋㅋㅋㅋㅋ
고급 기종에서는 헤드부분의 레버 구멍위치에 따라 기동의 느낌을 다르게 할 수 있도록 한 것이 많습니다.
둔하게도 혹은 민감하게도.. 개인적으로 선택할 수 있도록 말이지요. 하지만 보통은 안되는 기종이 많습니다.
그래서 스와시 타각을 크게 하지 않고 잘넘어가도록 하기 위한 방법으로 첫번째는 스와시에서 피치에 연결되는
부분의 볼을 긴것으로 바꿔주는거죠. 외국 선수인 바비가 이 팁을 사용하여 많이 돌아다녔었죠 ^^ 암튼 이렇게 해서
스와시 기울기에 의한 사이클릭 피치값은 좀더 커지게 됩니다.
그리고 또 생각해보면 위 자이로 프리세션의 각 방향에서 사이클릭 피치에 의한 힘이 크게 작용하도록 뭔가 바꿔주면
되는데요. 아무리 생각해 봐도 역시 메인로터 밖에 없습니당.. -_-;;; 따라서 아래와 같은 팁이 나오는것 같습니다.
1. 가벼운 로터가 더 잘넘어가고 피치웍도 좋습니다. 스와시 기울기에 의한 부하시도 RPM 유지력이 좋기 때문이죠.
2. RPM이 빠르면 각 방향에서 사이클릭 피치에 의한 힘이 더 커지므로 잘넘어가겠죠.
3. 아무래도 면적이 크면 사이클릭 피치에 의한 힘이 더 크겠죠? 따라서 좀더 길고 면적이 큰게 좋습니다만.... 그만큼 부하가 커져서 RPM이 죽는지 확인해 봐야 합니다. 괜히 광폭에다가 긴거 달아서 RPM이 넘 많이 죽어 버리면 오히려 기동이 더 느려질 수 있습니다.
4. 패들은 자세를 좀더 잘 잡아주기 위한 기계적 자이로의 원리가 같이 있는걸로 알고 있습니다. 그래서 패들이 없으면 헬기가 엄청 민감해진다고 하네요. 따라서 이 패들을 조절하여 좀더 잘 넘어가도록 하는 방법이 있는데요. 플라이바를 긴것으로.. 패들은 좀더 가볍게... 하면 잘 넘어갑니다.. ^^ 그래서 요즘 기본 패들에다가 가볍게 하기 위해 구멍을 뚫기도 하며 비싼 카본 패들도 옵션으로 나오는군요.
3D 기동을 RPM 저하 없이 잘 하기 위해 하드웨어적인 세팅을 어떻게 맞춰줘야 할지 대충 감을 잡으셨는지 모르겠습니다.
스와시 타각은 최대한 작게 해서 부하가 적도록 해주고.. 메인로터나 패들... 파워소스 보강으로 잘넘어 가도록 하는게
더 좋다는거죠. 한 예로 울나라 최고 선수인 재홍군도 저렇게 세팅한다는 얘길 많이 들었습니다. ^^
물론 거기에 부하받는 연기시 신속하게 피치를 빼고 넣고 할 수 있는 손꾸락도 필요하겠죠 ㅋㅋㅋㅋ 2007년도에 G3를 하다가 기체 에디트에 보면 Cyclic pitch 라고 되어 있었는데 이 값을 변화시켜주면
헬기의 기동(에일러론 엘리베이터)이 잘되던 기억이 있었습니다. 그 때는 이게 왜 피치 인가 라고 생각했었지요.
피치 라고 하면 첨엔 당연히 상승 하강을 하기 위한 메인로터의 각도를 얘기하는거 아닌가 라고 했었죠.
하지만 이 피치에는 두가지가 있더라구요. 둘다 메인로터의 각도를 얘기하는것은 맞습니다만
작용하는 힘이 다 틀리답니다.
첫번째로 Collective Pitch 콜렉티브 피치입니다.
이것은 다들 아시는것 처럼 상승 하강에 관여하는 메인로터의 피치값을 의미합니다.
세팅 방법은 다들 아시다시피 피치 그래프는 0 25 50 75 100으로 직선으로 된 상태에서
조종기 스로틀 레버 중간에 두고 피치는 0도.. 최대 최하에서 보통 12도 -12도 로 설정합니다.
이 설정 방법에 대해서는 많은자료가 있으니 참고해보시구요.
오늘 얘기하고자 하는 중심은 바로 Cyclic Pitch 사이클릭 피치 입니다.
이것도 메인로터의 피치값을 측정하기는 합니다만 그 작용되는 힘이 다릅니다.
그전에 앞서 설명드린 헬기의 기동 원리에 대해 살펴볼까요.
자이로스코픽 프리세션(Gyroscopic Precession)이란 원리에 의해 헬기가 기동한다고 알려드렸습니다.
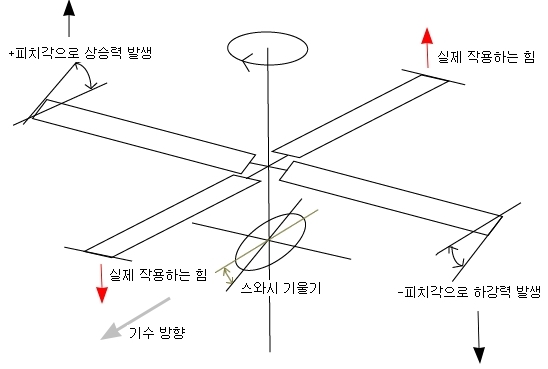
위 처럼 자이로프리세션의 원리에 의해 메인로터의 피치값이 한바퀴 회전할 때마다 각 방향에서
계속 변화하게 되어 이 힘에 의해 헬기가 기동하게 되죠. 이 때 조종기 스틱에 따라 스와시가 기울게 되는데 이 경우
각 방향에서 생기게 되는 메인로터의 피치값을 사이클릭 피치 라고 합니다. ^^
이 사이클릭 피치를 재는 방법은 스로틀 레버 중간에 두고 엘리베이터든 에일러론이든 하나의 키를 끝까지 치고서
메인로터의 피치값이 생기는 방향에서 피치값을 측정합니다. 보통은 7도 정도가 나오게 되구요.
이 사이클릭 피치가 클 수록 위 그림의 힘이 커지므로 헬기의 기동은 좋아지게 됩니다. 쉽게 말해 잘 넘어가는거죠 ㅋㅋㅋㅋ...
하지만 이 사이클릭 피치를 크게 하기 위해서는 스와시 타각을 키워야 하는데요. 너무 키우다 보면 스와시 시스템의 한계에
다다르게 되어 부하를 받아서 회전수가 떨어지게 됩니다. 따라서 잘넘어가게 하려고 스와시 믹싱값을 크게 하면 오히려
RPM이 떨어져서 더 안넘어가는 경우도 생길 수 있지요. 자 아뭏든 이 사이클릭 피치라는게 어떤건지 대략 아셨는지
모르겠습니다. 위 원리에 의해 패들이 없더라도 헬기는 기동하게 되구요. 패들은 자세를 좀더 정확히 잡아주기 위한
기계적 자이로 장치라고 생각하시면 되겠습니다. 물론 4채널 헬기들은 메인로터의 각도가 변화하지 않으므로
패들에 의해 기동을 하게 되겠죠.. ^^ 그래서 굼뜬다는 느낌이 들지도.. ㅋㅋㅋㅋㅋ
고급 기종에서는 헤드부분의 레버 구멍위치에 따라 기동의 느낌을 다르게 할 수 있도록 한 것이 많습니다.
둔하게도 혹은 민감하게도.. 개인적으로 선택할 수 있도록 말이지요. 하지만 보통은 안되는 기종이 많습니다.
그래서 스와시 타각을 크게 하지 않고 잘넘어가도록 하기 위한 방법으로 첫번째는 스와시에서 피치에 연결되는
부분의 볼을 긴것으로 바꿔주는거죠. 외국 선수인 바비가 이 팁을 사용하여 많이 돌아다녔었죠 ^^ 암튼 이렇게 해서
스와시 기울기에 의한 사이클릭 피치값은 좀더 커지게 됩니다.
그리고 또 생각해보면 위 자이로 프리세션의 각 방향에서 사이클릭 피치에 의한 힘이 크게 작용하도록 뭔가 바꿔주면
되는데요. 아무리 생각해 봐도 역시 메인로터 밖에 없습니당.. -_-;;; 따라서 아래와 같은 팁이 나오는것 같습니다.
1. 가벼운 로터가 더 잘넘어가고 피치웍도 좋습니다. 스와시 기울기에 의한 부하시도 RPM 유지력이 좋기 때문이죠.
2. RPM이 빠르면 각 방향에서 사이클릭 피치에 의한 힘이 더 커지므로 잘넘어가겠죠.
3. 아무래도 면적이 크면 사이클릭 피치에 의한 힘이 더 크겠죠? 따라서 좀더 길고 면적이 큰게 좋습니다만.... 그만큼 부하가 커져서 RPM이 죽는지 확인해 봐야 합니다. 괜히 광폭에다가 긴거 달아서 RPM이 넘 많이 죽어 버리면 오히려 기동이 더 느려질 수 있습니다.
4. 패들은 자세를 좀더 잘 잡아주기 위한 기계적 자이로의 원리가 같이 있는걸로 알고 있습니다. 그래서 패들이 없으면 헬기가 엄청 민감해진다고 하네요. 따라서 이 패들을 조절하여 좀더 잘 넘어가도록 하는 방법이 있는데요. 플라이바를 긴것으로.. 패들은 좀더 가볍게... 하면 잘 넘어갑니다.. ^^ 그래서 요즘 기본 패들에다가 가볍게 하기 위해 구멍을 뚫기도 하며 비싼 카본 패들도 옵션으로 나오는군요.
3D 기동을 RPM 저하 없이 잘 하기 위해 하드웨어적인 세팅을 어떻게 맞춰줘야 할지 대충 감을 잡으셨는지 모르겠습니다.
스와시 타각은 최대한 작게 해서 부하가 적도록 해주고.. 메인로터나 패들... 파워소스 보강으로 잘넘어 가도록 하는게
더 좋다는거죠. 한 예로 울나라 최고 선수인 재홍군도 저렇게 세팅한다는 얘길 많이 들었습니다. ^^
물론 거기에 부하받는 연기시 신속하게 피치를 빼고 넣고 할 수 있는 손꾸락도 필요하겠죠 ㅋㅋㅋㅋ
 공지사항
공지사항 



 수로조황
수로조황




 월척
월척

 지도보기
지도보기